EVENTOS
Homenaje al Ing. Claudio Verrastro – Agosto de 2023
Después de haber conformado y dirigido el Grupo de Inteligencia Artificial y Robótica por más de 30 años, se retiró. Autoridades, compañeros y amigos lo agasajaron en agradecimiento a su esfuerzo y dedicación.
Nota completa en: https://www.frba.utn.edu.ar/homenaje-al-ing-claudio-verrastro/

Seminario de Transfer Learning para Visión Artificial
UTN Buenos Aires, Medrano 951, CABA. Fecha y horarios: 1 y 8 de noviembre de 19.00 a 22.00hs.
Link de inscripción: https://docs.google.com/forms/d/1sfFv5QRhwb4eqVH4NjpAZvdzpLc4YelbncMCWlsdlxg/viewform?edit_requested=true

Seminario de Aprendizaje Profundo por Refuerzo
UTN Buenos Aires, Medrano 951, CABA. Fecha y horarios: 24, 25 y 26 de Octubre de 18.30 a 20.30hs.
Link de inscripción: https://forms.gle/g1tVyCR6RqAEYRSY8

Eventos en los que hemos participado
VIII Jornadas Argentinas de Robótica (VIII JAR) 2014
UTN Buenos Aires, del 12 al 14 de noviembre de 2014
Actas de las VIII Jornadas Argentinas de Robótica (ENLACE)
Revista UTN.BA en Movimiento Nº 42 (ENLACE)
Imágenes
Asistentes a las VIII JAR
Premios exhibición de Multicópteros

Mención Estudiantil

Colaboradores de GIAR

VI Congreso Latinoamericano de Ingeniería Biomédica CLAIB 2014
Paraná, Entre Ríos, Argentina 29, 30 y 31 de Octubre 2014

El CLAIB 2014 pretende conformar un espacio de discusión sobre temas inherentes al diseño, desarrollo y aplicación de tecnología y herramientas de gestión relacionadas a la Ingeniería Biomédica en el ámbito de las instituciones de salud
Paper presentado en el CLAIB 2014 (PDF)
Feria de Ciencias “Del Laboratorio al barrio”
UTN Facultad Regional Buenos Aires, (sede Campus), 27 y 28 de octubre de 2014
Feria itinerante de ciencias, destinada a estudiantes de escuelas de zonas vulnerables
Imagenes
Feria itinerante “Del Laboratorio al Barrio”

Feria itinerante “Del Laboratorio al Barrio”

Simposio Argentino de Sistemas Embebidos (SASE) 2014
Universidad de Buenos Aires, Facultad de Ingeniería, entre el 13 y el 15 de agosto de 2014

Se presentaron dos Tutoriales:
“Aprendizaje por refuerzo”.
Ing. J. C. Gomez , Ing. C. Verrastro
“Programación de Robots utilizando hoja de cálculo”.
Ing. S. Alberino , Ing. P. D. Folino
Imágenes:
Tutorial: Aprendizaje por Refuerzo

Tutorial: Aprendizaje por Refuerzo

Tutorial: Programación con planilla de cálculo
Tutorial: Programación con planilla de cálculo

Revista UTN.BA en Movimiento Nº 41
Semana de la Ingeniería y Feria de Proyectos UTN-FRBA 2013
Universidad Técnológica Nacional Facultad Regional Buenos Aires, 26 al 31 de agosto de 2013
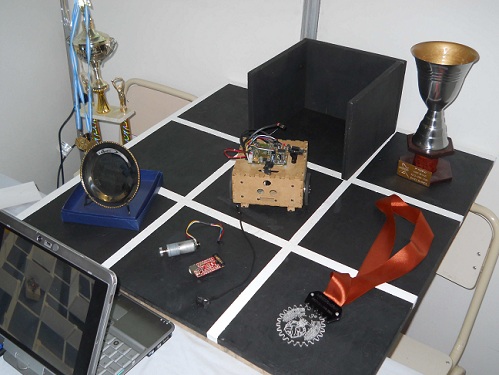
Se participó con el robot Aserrin/MiniPI. para resolución de Laberintos. Se obtuvo el primer puesto en la categoría Proyecto de Investigación.
“Robótica Colaborativa”
Robot “Aserrín” para resolución de Laberintos
Primer premio en Categoría Proyecto de Investigación
Imagenes:
Cierre de la Feria de Proyectos

Stand Robótica Colaborativa
Stand Robótica Colaborativa

IV Seminario de Inteligencia Artificial y Robótica 2012
Universidad Técnológica Nacional Facultad Regional Buenos Aires, 12 y 13 de Noviembre 2012

- Robótica Colaborativa
- Visión Estéreo
- Ubicación y Mapeo Simultáneo (SLAM)
- Navegación Reactiva
- Programación Genética
- Control Difuso
- Robótica Móvil
- Reconocimiento de patrones
- Aplicaciones de IA a las Neurociencias
- Reconstrucción de Imágenes Tomográficas
- Métodos Montecarlo
- Temas Abiertos
Poster:

9° COMPETENCIA NACIONAL de ROBÓTICA
UTN Facultad Regional Bahía Blanca – 12 de Noviembre 2011

Imágenes:
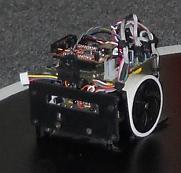
Robot Dadinho (primer puesto en categoría MiniSumo)
XIVRPIC: XIV Reunión de Trabajo en Procesamiento de la Información y Control
Universidad Nacional de Entre Ríos, Oro Verde, Entre Ríos, Argentina, 16 al 18 de noviembre de 2011

Papers presentados en la XIVRPIC (ENLACE)
Semana de la Ingeniería y Feria de Proyectos UTN-FRBA 2011
Universidad Técnológica Nacional Facultad Regional Buenos Aires, 2 al 7 de octubre de 2011
Organizada por el Centro de Estudiantes de Ingeniería Teconlógica (CEIT) de la FRBA
En la Feria de Proyectos se presentaron los proyectos:
“AR-PET ” (Tomógrafo por Emisión de Positrones de Tecnología Nacional): Primer premio en Categoría Proyecto de Investigación
Claudio Verrastro; Fernando Carmona; Elías da Ponte
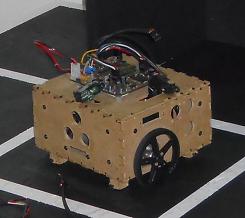
“Mini Plataforma Inteligente”: plataforma inteligente de dimensiones reducidas, para utilizar en aplicaciones de robótica ( inspección, robótica colaborativa, sumo de robots, futbol de robots, etc.)
Fernando Carmona; Damián Pirlo; Juan Manuel Gabis ; Maximiliano Marufo Da Silva; Juan Cuccorese; Fernando Sampieri
También se dictaron charlas sobre robótica a cargo de Claudio Verrastro; Juan Carlos Gomez;, Sergio Alberino y Pablo Folino
Imágenes:
Proyecto: Mini PI

Proyecto: PET (Tomógrafo por Emisión de Positrones)

Entrega de premios

Feria de Ciencia y Tecnología: Tecnópolis
Villa Martelli, Buenos Aires, Julio- agosto de 2011

Exposición + Demostración en Video de:
“Robótica Colaborativa”
24 de Julio de 2011
“Joystick Virtual”
17 de Agosto de 2011
Imágenes:
Charla sobre Robótica Colaborativa

Charla sobre Robótica Colaborativa

Feria de Proyectos UTN-FRBA 2010
Universidad Tecnológica Nacional Facultad Regional Buenos Aires, 2 y 3 de junio de 2010
Organizada por el Centro de Estudiantes de Ingeniería Tecnológica (CEIT) de la FRBA

Se presentaron los proyectos:
“Diseño abierto para la construcción de robots inteligentes (DACRI) ”
Claudio Verrastro; Fernando Carmona; Damián De Biase; Elías da Ponte, Sergio Alberino, Pablo Folino, Leandro Tozzi
“Portico AR-PET ”
Claudio Verrastro; Fernando Carmona; Damián De Biase; Elías da Ponte
“Visión Artificial 3D ”
Ramiro Verrastro, Rodolfo Cignoli, Alexis Peppe Pardini, Leandro Di Matteo
“Sistema de lectura de formularios manuscritos (ICR) ”
Lucio Martínez, Augusto Carimatto, Juan Carlos Gómez.
Plataforma PMIR en la Feria de Proyectos UTN-FRBA2010 (VIDEO)
Imagenes:

Visión 3D

Sistema de lectura automática de formularios manuscritos (ENLACE)

Proyecto: PET (Tomógrafo por Emisión de Positrones) (ENLACE)

Seminario de IA y Robótica 2010
Universidad Tecnológica Nacional Facultad Regional Buenos Aires, 12 y 13 de Mayo de 2020
Organizado por la IEEE, Rama Estudiantil de la FRBA
![]()
Información sobre los trabajos presentados (ENLACE)
Diseño abierto para la construcción de robots inteligentes – Proyecto DACRI
DACRI 1 – “Brazo robótico 5AR” Fernando Carmona, Damián De Biase, Elias Da Ponte
DACRI 2 – “Control Electrónico de plataforma y brazo robótico” Sergio Alberino, Pablo Folino
DACRI 3 – “Intérprete de instrucciones” Leandro Tozzi.
DACRI 4 – “Navegación óptima por líneas de potencial” Augusto Carimatto
DACRI 5 – “Control de motores PWM con lógica difusa” Sebastián Muruaga
Tomógrafo por emisión de positrones: Proyecto AR-PET (ENLACE)
AR-PET 1 – “De la primer radiografía al primer tomógrafo por emisión de positrones argentino”
AR-PET2 – “Estructura mecánica del tomógrafo AR-PET”
Procesamiento digital de Imágenes: (Enlace)
Imágenes 1 – “Sistema de lectura automática de formularios manuscritos (OCR/ICR)” Lucio Martínez Garbino; Matías Dalletesse; Augusto Carimatto;Leandro Di Matteo;Juan Carlos Gómez.
Imágenes 2 – “La retina como procesador de imágenes – Hacia una retina artificial” Leonardo Servalli
Imágenes 3 – 3D Mapping – Mapeo tridimensional de la topología del entorno mediante sistema de visión artificial estereoscópica” Leandro Di Matteo, Ramiro Verrastro, Rodolfo Cignoli, Ignacio Bertacchini, Alexis Peppe Pardini
Imágenes 4 – “Procesamiento digital de imágenes aplicado al control de calidad del armado de circuitos electrónicos” Eduardo Andino
Aplicaciones de la Inteligencia Artificial a las Neurociencias
Neuro 1 – “PROSECER” (Procesamiento de señales cerebrales) Emiliano Statello; C. Verrastro (UTN); M. Eguía (UNQ)
Algoritmos Geneticos
GEN 1 – “Programación Genética” Daniel José Abate
Imagenes:
J. C. Gómez y C. Verrastro presentan los temas a tratar en el Seminario.

XIIIRPIC: XIIIª Reunión de Trabajo en Procesamiento de la Información y Control
Facultad de Ciencias Exactas, Ingeniería y Agrimensura de la Universidad Nacional de Rosario, 16 al 18 de Setiembre de 2009
Papers presentados en la XIIRPIC:
Mapeo y navegación por nodos de potencial para robótica Móvil
Para que un robot móvil pueda desenvolverse en distintos ambientes, estructurados o semiestructurados, es necesario que cuente con un mapa de su entorno o que lo pueda construir utilizando sus sensores de abordo. Sobre este mapa se debe calcular la trayectoria entre la posición actual y el objetivo evitando obstáculos. En este trabajo se presenta un método para obtener dicha trayectoria.
Mapeo y navegación por nodos de potencial para robótica Móvil (PDF)
Augusto Carimatto, Claudio Verrastro, Juan Carlos Gómez
Control PID con Filtro Dinámico de Promedios Móviles Ponderados Exponencialmente (dEWMA-PID)
Resumen Se propone una versión de control PID cuyos términos son calculados por medio de un filtro recursivo basado en Promedios Móviles Ponderados Exponencialmente. Los parámetros del filtro se ajustan dinámicamente en función del valor de la señal de error, a fin de obtener una respuesta que satisfaga las condiciones de velocidad y rechazo al ruido.
Este algoritmo hace uso de la información estadística del error de medición, a la vez que tiene bajos requerimientos de procesamiento y es de simple implementación, siendo ideal para su uso en sistemas de tiempo real y robots móviles.
Control PID con Filtro Dinámico de Promedios Móviles Ponderados Exponencialmente (dEWMA-PID) (PDF)
Claudio Verrastro, Juan Carlos Gómez, Sergio Alberino y Pablo Folino
Metodo de Calibración de Cámara Gamma y Tomógrafo por Emision de Positrones (PET) con Medición Única
Resumen El procedimiento de ajuste inicial de equipos de Cámara Gamma, tomografía SPECT o PET es una tarea que insume tiempo pero es fundamental para el buen funcionamiento del equipo. Con este procedimiento se busca uniformizar la eficiencia en toda la superficie de los cristales detectores afectada por la dispersión de la ganancia de los tubos fotomultiplicadores, por factores geométricos y constructivos. La mayoría de los métodos de calibración son iterativos y utilizan mediciones con fuentes gamma similares a las empleadas en los estudios.
En este trabajo se presenta un método de calibración basado en una sola medición de campo inundado, a partir de la cual se ajusta la ganancia de los fotomultiplicadores para lograr una resolución en energía optima, al mismo tiempo se ajustan los coeficientes geométricos para el algoritmo de ponderación de la posición planar (algoritmo de Anger) y se calculan los factores de normalización de la eficiencia de conteo.
Método de Calibración para Cámara Gamma y PET con una Medición Única de Campo Inundado (PDF)
Esteban.Venialgo, Claudio Verrastro, Daniel Estryk, Martín Belzunce
Imagenes:
En la Facultad de Ciencias Exactas, Ingeniería y Agrimensura de la Universidad Nacional de Rosario

V JORNADAS ARGENTINAS DE ROBOTICA 2008
Universidad Nacional del Sur, Bahía Blanca, 12 al 14 de noviembre de 2008

Papers presentado en la JAR2008:
Control Joystick Virtual
Resumen: En este trabajo se presenta una alternativa de interacción usuario-máquina, que tiene como objetivo principal brindar un control más intuitivo sobre el sistema de visión de un equipo. Se controla una cámara en tiempo real respondiendo a los movimientos de la cabeza del usuario. De esta manera deja al usuario las manos libres para utilizar otros controladores, permitiendo una mayor concentración en la tarea central que se realiza.
Bertacchini Ignácio, Carmona Fernando, Cignoli Rodolfo, De Biase Damián, Verrastro Ramiro
Exploración con mapeo dinámico
Resumen-En los robots móviles, la necesidad de detectar obstáculos y evadirlos es una tarea fundamental. En este trabajo se presenta un sistema que, además de ser capaz de detectar y evadir obstáculos, genera un mapa del entorno, el cual le permite recalcular la trayectoria obteniendo el camino mas corto hasta el objetivo.
Exploración con mapeo dinámico (PDF)
Fernando Carmona, Damián De Biase, Ramiro Verrastro, Rodolfo Cignoli
Seminario de IA y Robótica 2008
Universidad Técnológica Nacional Facultad Regional Buenos Aires, 28 de Junio de 2008
Organizado por la IEEE, Rama Estudialtil de la FRBA
![]()
Información sobre los trabajos presentados (PDF)
Feria de Proyectos UTN-FRBA 2007
Universidad Técnológica Nacional Facultad Regional Buenos Aires, Noviembre 2007
Organizada por el Centro de Estudiantes de Ingeniería Teconlógica (CEIT) de la FRBA
Se presentaron los proyectos:
“Exploración con mapeo dinámico”
Fernando Carmona; Damián De Biase; Ramiro Verrastro; Rodolfo Cignoli.
“Joystick Virtual”
Ignacio Bertacchini, Fernando Carmona, Rodolfo Cignoli.
“Sonar por ultrasonido”
Augusto Carimatto, Melisa Villafañe, Javier Nersesian ,Juan Manuel Perdomo
Programa de TN Ciencia sobre la Feria de Proyectos UTN FRBA 2007
joystick virtual, de Ramiro Verrastro; Rodolfo Cignoli.
Programa de TN Ciencia sobre la Feria de Proyectos UTN FRBA 2007
Mapeo dinamico, por Fernando Carmona; Damián De Biase; Ramiro Verrastro; Rodolfo Cignoli.
4th International Symposium on Autonomous Minirobots for Research and Edutainment
Universidad del Buenos Aires, 2 al 5 de Octubre de 2007

Paper presentado en Amire 2007:
Fast self tuning PID controller specially suited for mini robots
ABSTRACT: The use of complex self tuning Proportional, Integral and Derivative (PID) controller, to drive the speed and direction in mini robot, is limited by calculus power and by the precision and noise of the on board input sensors, particularly severe problems arise in computing the derivative term. In this work a PID whose terms are computed from filtered input with a simple recursive Exponentially Weighted Moving Average (EWMA) is used. In order to solve the tradeoff between speed and noise rejection, parameters of the filter are dynamically adjusted using statistical criteria. Due to its low resource requirements and the simplicity of implementation the presented algorithm is well suited for use in mini robots.
Fast self tuning PID controller specially suited for mini robots (PDF)
Claudio Verrastro, Sergio Alberino , Pablo Folino y Juan Carlos Gómez
Workshop “Using the Open Source Robotic Application Construction Kit (RACK)”
Universidad Técnológica Nacional Facultad Regional Buenos Aires, 9 y 10 de Octubre de 2007
Coorganizado por GIAR – FRBA

A cargo del Prof. Dr.-Ing. Bernardo Wagner University of Hannover – Real Time Systems – RTS
Advisors: Marko Reimer y Jorge Nieto
Marko Reimer explica los usos del RACK

Feria de Proyectos UTN-FRBA 2006
Universidad Técnológica Nacional Facultad Regional Buenos Aires, Noviembre 2006
Organizada por el Centro de Estudiantes de Ingeniería Teconlógica (CEIT) de la FRBA
Primer premio en Categoría grupo de investigación
GIAR ROBOTS: (AUTORES Rodolfo Cignoli y Ramiro Verrastro)



Seminario de “Introducción a la Robótica”
Universidad Técnológica Nacional Facultad Regional Tucumán, 3 de Octubre de 2006
A cargo de Carlos Fernando Carmona y Damián De Biase, del GIAR
El brazo M-4 brazo robótico, premiado por el INTI .
Seminario de IA y Robótica 2006
Universidad Técnológica Nacional Facultad Regional Buenos Aires, 4 y 5 de Abril de 2006
Organizado por la IEEE, Rama Estudialtil de la FRBA
![]()
Programa del evento en la página de la IEEE (Enlace)
Feria de Proyectos UTN-FRBA 2005
Universidad Técnológica Nacional Facultad Regional Buenos Aires, Noviembre 2005
Organizada por el Centro de Estudiantes de Ingeniería Teconlógica (CEIT) de la FRBA
El M-4 y la PMIR en un recorte de la Revista Fortuna, Noviembre 2005

Poster:
XIRPIC: XIª Reunión de Trabajo en Procesamiento de la Información y Control
Universidad Nacional de Río Cuarto, Rio Cuarto Córdoba, 21 al 23 de septiembre de 2005


Papers presentados en la XIRPI:
Controlador Difuso Multivariable del Perfil de Temperatura de un Horno
Controlador Difuso Multivariable del Perfil de Temperatura de un Horno (PDF)
Daniel J. López Amado, Diego García, Leonardo Davico y Sebastián Verrastro
Control PID con esquema adaptivo de filtrado de ruido
Control PID con esquema adaptivo de filtrado de ruido (PDF)
Claudio Verrastro, Sergio Alberino y Pablo Folino
Controlador Multivariable con Técnicas de Lógica Difusa
Controlador Multivariable con Técnicas de Lógica Difusa (PDF)
Daniel J. López Amado, Diego García, Leonardo Davico y Sebastián Verrastro
Route planning for vehicle autonomous navigation, based on geometrical regions.
Part I: Single approach point
Part I: Single approach point (PDF)
L. M. Di Matteo, A. C. Mangone, M. L. Muzzio, C. Verrastro
Route planning for vehicle autonomous navigation, based on geometrical regions.
Part II: Multiple approach points
Part II: Multiple approach points (PDF)
L. M. Di Matteo, A. C. Mangone, M. L. Muzzio, C. Verrastro
Campeonato Argentino de Futbol de Robots 2005
Universidad de Morón, Mayo de 2005
Se obtuvo el Cuarto Puesto de la competencia Nacional

Papers relacionados con el equipo de futbol de robots:
Equipo de Fútbol de Robots UTNfrba (PDF)
L. M. Di Matteo, A. C. Mangone, M. L. Muzzio
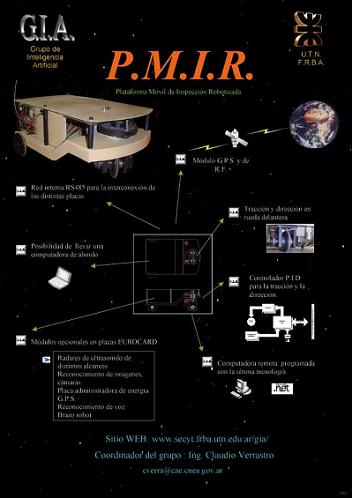
Exposición AADECA 2004
Ciudad de Buenos Aires, Septiembre de 2004

Presentación de la plataforma PMIR

V Jornadas Iberoamericanas de Robótica
Centro de Formación de la Cooperación Española de Santa Cruz de La Sierra – Bolivia, Mayo de 2004.
Organizada por Programa Iberoamericano de Ciencia y Tecnología para el Desarrollo CYTED
Participación de dos miembros del grupo (que fueron becados para asistir) y presentación de tres papers de investigación
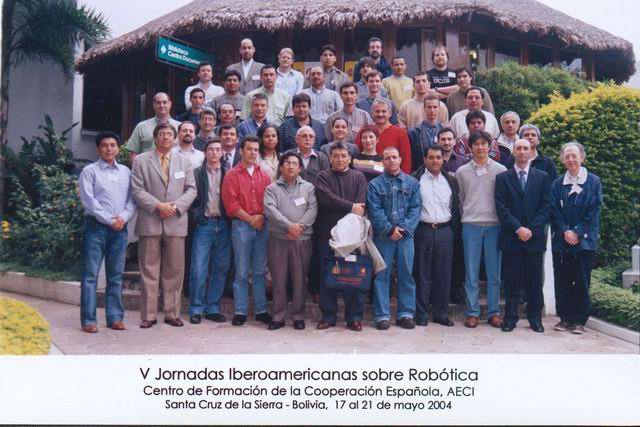
Seminario sobre aplicaciones de métodos avanzados de procesamiento de señales orientados a la detección temprana de fallas en los sensores, y de vibraciones anómalas en los internos de los reactores nucleares de potencia. (Neuro-Fuzzy)
Dictado por el Profesor Lefteri Tsoukalas (Nuclear Engineer) (primero a la izquierda)

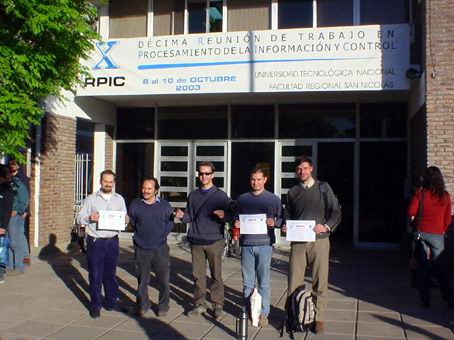
XRPIC: Xª Reunión de Trabajo en Procesamiento de la Información y Control
Universidad Tecnológica Nacional – Facultad Regional San Nicolás, Septiembre 2003
Se presentaron y expusieron cuatro papers de investigación sobre control y robótica
Papers presentados en la XRPIC:
Controlador de motores paso a paso mediante técnica de micropasos por modulación de ancho de pulso
Octubre de 2003 – San Nicolás
Sistema de comando y navegacion para robot movil con arquitectura distribuida
SISTEMA DE COMANDO Y NAVEGACION PARA ROBOT MOVIL CON ARQUITECTURA DISTRIBUIDA (PDF)
Octubre de 2003 – San Nicolás
Variante en el algoritmo pid para evitar el uso de un generador de trayectoria trapezoidal
VARIANTE EN EL ALGORITMO PID PARA EVITAR EL USO DE UN GENERADOR DE TRAYECTORIA TRAPEZOIDAL (PDF)
Octubre de 2003 – San Nicolás
Robot para exploración de cañerías, de diseño compacto, modular, estanco y de seguridad intrínsica.
Octubre de 2003 – San Nicolás



